
Robotique industrielle TD n?1
Institut des Systèmes Intelligents et de Robotique (CNRS UMR 7222) ... Eventuels exercices à rendre et/ou interrogations surprises. Examen de 4h00 sans ...

robotique - ENSTA Bretagne
Augmentez votre Productivité avec nos machines de Palettisation - Devis Gratuit

Notes de cours, GPA546 ? Robotique industrielle - Cours | ÉTS ...
2.3 Programmation et manipulation du robot . ... 4.11 Réponses aux exercices . ... Remise `a zéro de toutes les définitions des signaux de test. TextTabInstall.

8224-sujet-u2.pdf - Eduscol
Le manipulateur DELTA est un robot en translation pure grâce à des avant bras avec des parallélogrammes. Figure 1.10: Manipulateur parallèle DELTA. Page 33 ...

Chapitre 1 - Les mouvements d'un robot
Pour répondre aux besoins de manutention de pièces, le robot manipulateur doit réaliser les fonctions suivantes : - FP1 : - FC1: Assurer l'alimentation en ...

Corriger Examen final
Corriger Examen final. Intelligence artificielle II (IFT-17587). De 15h30 à 18h20 le 2 mai 2002, salle PLT-2341. Question 1 (15 points).

Feuille de travaux dirigés n°7 - Sciences Industrielles en CPGE
Exercice 2 - Robot Scara. Corrigé page 30. Présentation. Le robot SCARA (?Selective Compliance Assembly Robot Arm) est l'un des robots les plus utilisés.

EXERCICE PRATIQUE Pour nouveaux utilisateurs du Logiciel Robot
Dans le champ (répéter) on doit saisir touj ours la valeur 1 puisqu on n a pas des valeurs entraxe qui se répètent (sauf pour l axe Z ou on peut répéter 4 ...

Recueil d'Exercices Corrigés Python - Libre comme la Banquise
La France prend le train de la révolution électrique et est bientôt prête à ... E) Tout les matins, je fais de l'exercice pour être en forme durant la journée. Question ...

1-pg gard Corrigée
III.3 Commande backstepping adaptative avec observateur d'un robot . ... La deuxième méthode cherche à corriger au moyen d'une deuxième étape de.

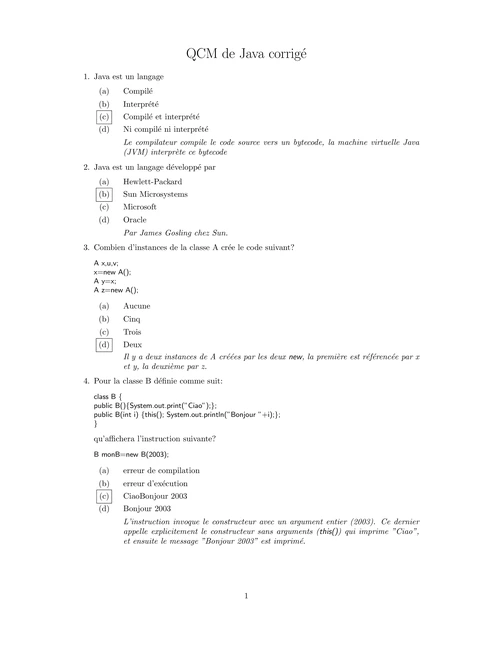
Exercices de Programmation Orientée Objet en Java - MIS
A quel affichage conduit l'exécution du programme (éventuellement corrigé)? class Test { int i;. Test(Test t) { if(t == null) this.i = ...

Cours et exercices corrigés - fnac-static.com
Nous avons vu (durant l'exercice 6) les trois façons de définir les styles d'une page HTML. L'avantage des styles externes, c'est qu'une modification dans cette? ...

Devoir sur Table 3 - Correction. - eXoMorphisme
Exercice n°1 : Voici les notes obtenues par 13 élèves à un devoir de ... 3) Calculer en km par heure la vitesse moyenne de Laurent sur le parcours total.
Sujet et Corrigé Olympiades de Maths, Aix-Marseille ... - Freemaths.fr
Corrigé des exercices de français, de mathématiques et de lecture de la semaine 1. Correction des ... feuille : feuillage ? feuilleter ? feuilleton rêve : rêveur ...

Sciences industrielles de l'ingénieur MPSI PCSI PTSI
Cours, exercices corrigés et illustrations en MATLAB et Octave ... 8.2.4 Approximation par différences finies du problème ... x = x + delta;.

Examen mi-session Intelligence Artificielle II (IFT-17587) Jeudi 1
Examen mi-session. Intelligence Artificielle II (IFT-17587) ... Comment pouvez vous modifier A* de façon à utiliser ... Corrigé de l'examen de mi-session.
Marc Boullis - Collège Léo Othily
seront le logiciel Scratch pour réaliser les exercices proposés. Dans la seconde partie du livret sont proposés des projets qui invitent les élèves à synthétiser les ...

Untitled
Exercices de Mathématiques - Terminales S, ES, STI2D, STMG ... évaluation avec prise d'initiative », tout en conservant une entrée progressive dans le sujet,.

Modélisations géométrique et cinématique de Robots
8.9 TD robot manipulateur planaire à 4 ddl . ... Robot : Système complexe capable, grâce à ses fonctions de manipulation et (ou) de locomotion, de remplacer ...