
TD1 : Rappel et optimisation sans contrainte
Exercice 5. Soient f et g deux fonctions numériques définies sur une même partie A de R. 1. Prouver que si f ? g et si f est minorée sur A, alors g est ...

Exo-12-Corrige-Robot-Scara.pdf - Patrick Dupas
Corrigé d'exercice de SII. EXERCICE 12 ROBOT DE MANUTENTION SCARA SR-1504HZ. ? PREMIERE ETUDE: Q1 - Isoler l'ensemble 3 4. ? et dresser le bilan des actions ...

TD + Correction Cinematique.pdf
Les mouvements du robot sont commandés par deux moteurs M? et M?. Le solide 1 ... ée - Corrige |. Exercice n°1. 1.1. 1.2]. ??. ???,. 02. (110) =?. I Zo. 7200.

Feuille de TD n 2 : Méthodes numériques pour les équations ...
Exercice 5 : Méthodes implicites. On consid`ere l'équation y = ?y avec y(0) = 1. 5.1. Montrer la stabilité, la consistance et calculer l'ordre des méthodes d' ...

Corrigé Exercice 1 : ROBOT 2 AXES.
Déterminer les caractéristiques du mouvement ? TD8 : Composition des mouvements CORRIGÉ. Page 1 / 5. CORRIGÉ. Exercice 1 : Robot cueilleur de fruits.

Déterminer les Caractéristiques du Mouvement M - mnsi
En effet, ce recueil d'exercices et de problèmes corrigés regroupe des extraits de : ? Concours pour les étudiants de Classes Préparatoires Scientifiques ...

Génie électrique - Les grandes fonctions de la chaîne d'énergie
EXERCICE 1. 1. Afin d'éclairer le directeur informatique quant à la décision de la composition de l'équipe projet destinée à accompagner le service ...

Corrigés des exercices du livre et en ligne - Vuibert
Corrigé TD cinématique du solide : Position d'un solide. Exercice 1 : Robot manipulateur 2 axes. 3. 2 . .yyxa. AB. OA. OB ? ?. +. = +. = 1. 1. 2 .sin . cos y x.

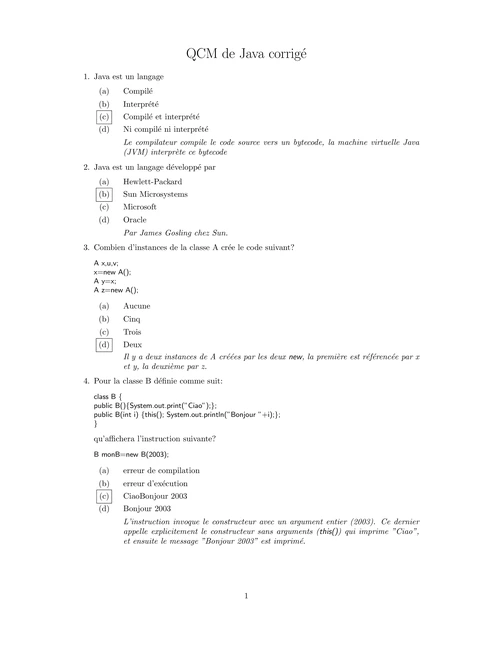
Examen final de Programmation Objet : Corrigé-type
Ce corrigé comporte 11 pages numérotées de 1 sur 11 à 11 sur 11. Page 1 sur 11. Page 2. 20SISCMLR1C. Robot nettoyeur multi-surfaces. 1. Présentation. Q1. En ...

Position d'un solide Exercice 1 - AlloSchool
DS 5 (Centrale 2018) - Corrigé. 2019 - 2020. 1 Déplacement d'un robot dans une grille. Question 1. Un exercice classique de programmation. La référence i1 garde ...

Examen Final en Robotique - ResearchGate
Les choix technologiques de conception du robot Sphero ont été réalisés afin que « naturellement » le robot n'ait ... sans correction afin de mettre en évidence ...

20SISCMLR1C - Robot nettoyeur multi-surfaces - Eduscol
Construire les figures planes associées au schéma cinématique. Correction x0 y0 x1 y1 z0. 0.

Corrigé 1 Déplacement d'un robot dans une grille - MP2 - Chato
demi-tour, calculer la vitesse angulaire de rotation COmbot du robot. /0 4.1.2 - En déduire la vitesse IIVNaErobot IRa Il du point ND appartenant au robot par ...
DNB - Brevet des Collèges 2018 Centres Étrangers - 18 juin 2018
Compléter la description fonctionnelle sous forme SADT d'un « axe » du robot chirurgical en remplissant les 3 cases vides des grandeurs physiques et les 4 cases ...

Robot SPHERO
Ces candidats sont dispensés de l'exercice 3. Leur note est calculée en prenant le nombre total du nombre de points obtenus par le candidat, divisé par 17, puis ...

TD - Robot ramasseur de fruits - Les SII en PTSI PT
cinématique du solide exercices corrigés pdf
Corrigé officiel complet du bac S Sciences de l'Ingénieur 2009
torseur cinématique exercices corrigés pdf

CORRIGE TECHNOLOGIE
schéma cinématique exercice corrigé pdf