
Exercices (partiel), yc. corrigés Pour la partie 2 du cours 2-0 ...
uvw. 2 xyz. Corrigé ? Variante à 6 repères. 6. Exercices de Robotique et automatisation, JDD 06.11.2013. 6. 2-0 Matrices de rotation aaa.mm.jj Corr. 6. 3. 3 uvw.

Corrigé Exercice 1 : ROBOT 2 AXES.
3.8 Exercice. Il s'agit d'établir le modèle géométrique direct du robot RX-90. Ce robot est un bras manipulateur industriel Stäubli (voir la figure suivante).

corrige robot de peinture - fltsi.fr
CORRIGE ROBOT INDUSTRIEL. Problématique. Comment utiliser l'outil torseur en mécanique des solides indéformables ? Contexte. Le système étudié est un ...

Exercices (partiel), yc. corrigés AIC-Automatisation avancée ...
s dynamiques définissant les équations du mouvement du robot qui pe tions entre ... La robotique est une science pluridisciplinaire qui comprend la mécanique, ...

Devoir Surveillé - MIS - Université de Picardie Jules Verne
Introduction: morphologie des robots manipulateurs ... Exercice 2 : L'objectif de cet exercice est d'établir le modèle géométrique direct du robot industriel TX-60.

Feuille de travaux dirigés n°7 - Sciences Industrielles en CPGE
Exercice 2 - Robot Scara. Corrigé page 30. Présentation. Le robot SCARA (?Selective Compliance Assembly Robot Arm) est l'un des robots les plus utilisés.

Robot Scara
L'IRB 580 de chez ABB est un robot de peinture extrêmement flexible, économique et précis utilisé notamment dans l'industrie automobile pour réaliser la ...

Robotique industrielle TD n?1
Institut des Systèmes Intelligents et de Robotique (CNRS UMR 7222) ... Eventuels exercices à rendre et/ou interrogations surprises. Examen de 4h00 sans ...

Question 3 :
TD 11 corrigé - Cinématique graphique - Composition des vecteurs vitesses. Page 1/8. MPSI-PCSI ... 02/12/2011. Corrigé Exercice 1 : ROBOT 2 AXES. Question ...

Module Robotique Exercice1 - E-monsite
de paramètres indépendants qui permettent de définir la position du robot à un ... L'objectif de cet exercice est d'établir le modèle géométrique direct du robot ...

robotique - ENSTA Bretagne
Augmentez votre Productivité avec nos machines de Palettisation - Devis Gratuit

FANUC Robotics
Corrigé des exercices. Les exercices 5, 14 et 17 seront corrigés en classe ... disparu, il y aura donc CaO(s) dans l'enceinte et du CO2(g) mais à une pression.

c02-td-1234-modeliser-le-comportement-cinematique-d-un-systeme ...
Exercice 1 : Robot manipulateur 2 axes. Le robot manipulateur représenté ci-?dessous possède deux degrés de liberté : ? Une rotation du corps (2) par rapport au ...
EXERCICE 2 Partie A - Un seul robot 1. Notons p la probabilité que ...
?3 x2 + 12x = 85 ? (x + 6)2 ? 36 = 85 ? (x + 6)2 ? 121 = 0 ? (x ? 5)(x + 17) = 0 ? x = 5 ou x = ? 17. ... 18 Cet exercice est corrigé dans le manuel, p. 342.

EXERCICE 4 (3 points ) La durée de vie d'un robot ... - Maths-france.fr
3) Comment se branche-t-il dans un circuit ? Il se branche en série, entre les bornes 10A et COM. 4) Donner la loi d'unicité ( ...

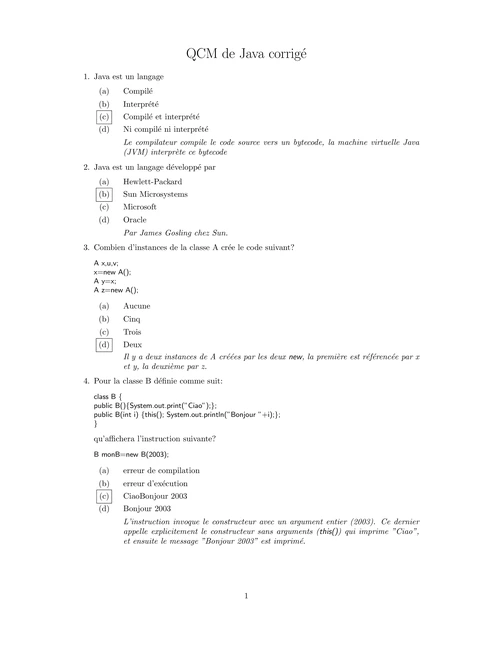
Examen final de Programmation Objet : Corrigé-type
de Programmation Objet : Corrigé-type. Année universitaire 2014-2015. 2e année licence informatique. Programmation Objet. Jeudi 15 janvier 2015. Exercice 1 ...
Partie Vision (12 points) Exercice 1 Exercice 2 - LAGIS
?il et accommodation exercice corrigé pdf

correction programmation pic axe - Collège Faubert
CORRECTION PROGRAMMATION PIC AXE. Faire un carré. ... Exercice 2 : ... 2 Corrige ce programme pour que le fonctionnement du robot soit celui attendu.

ROBOT TONDEUR AUTOMOWER - CORRIGE
Robot. Réseau. Le PC de supervision possède un algorithme qui permet de ... Correction. Exercice 1. Robot. Robot en attente. A ? Robot prêt. D ? Action.

Réseaux de Petri ? Exercices (3)
3) Déterminer les t-invariants et les interpréter. Page 3. Correction. Exercice 1. Robot. Robot en attente.